조회 8,855회 댓글 0건
 3
3
머니맨존
2023-06-22 17:25
[아롱 테크] '운전대 돌리면 뒷바퀴가 획' 꽉 막힌 주차장서 한 번에 성공

최근 대형 승용차는 물론 중형 SUV와 전동화 차량을 중심으로 앞바퀴뿐 아니라 뒷바퀴까지 조향해 주는 사륜 조향 시스템(4Wheel Steering System)을 탑재한 차량들이 늘어나고 있습니다.
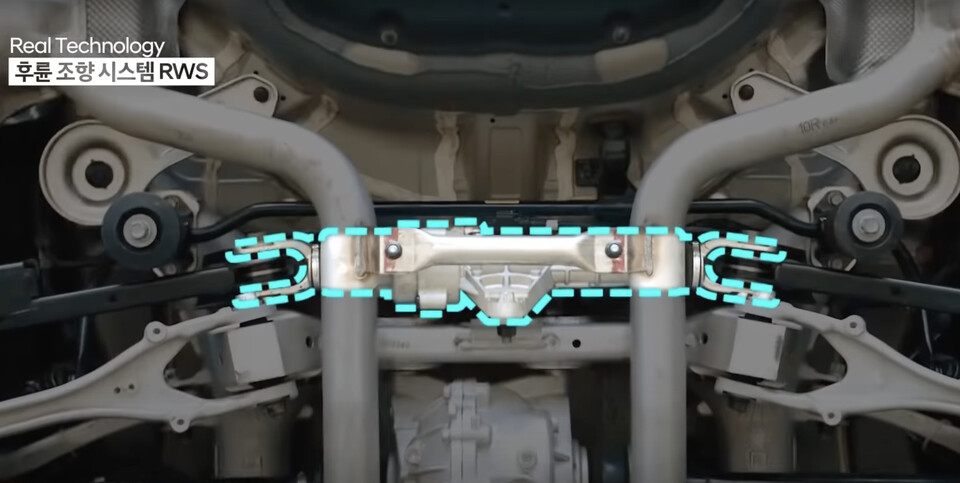
사륜조향시스템은 4휠 스티어링 시스템(4Wheel Steering System) 또는 리어휠 스티어링 시스템(Rear Wheel Steering System) 등 다양한 명칭으로 불리고 있지만 기본적으로 운전자가 스티어링 휠을 조작할 때 앞바퀴는 물론 뒷바퀴의 주행 방향을 변화시켜 조종 안정성을 향상시켜 주는 기능입니다.
자동차 조향시스템은 핸들(Handle)로 불리는 스티어링 휠과 스티어링 샤프트(조향축), 랙&피니언과 같은 조향기구가 타이어의 주행 방향을 바꿔 곡선도로를 주행할 때 안전하게 차량의 진행방향을 유지해 줍니다. 또한 좁을 골목길을 빠져나오거나 주차할 때에도 자동차가 주차된 차나 장애물을 피해 안전하게 주행 및 주차할 수 있게 도와주지요.
일반적인 조향 시스템은 뒷바퀴를 고정한 채 스티어링 휠의 회전 방향에 따라 앞바퀴를 좌우로 회전시켜 차량의 주행 방향을 설정하게 됩니다. 이러한 앞바퀴의 회전 각도를 스티어링 앵글(조향각)이라고 하는데요. 차종에 따라 차량의 회전 방향보다 안쪽 바퀴가 바깥쪽 바퀴보다 조향각이 더 큰 차가 있는 반면 안쪽 바퀴보다 바깥쪽 바퀴의 조향각이 더 큰 경우도 있습니다.

자동차는 이렇게 회전을 위해 꺾어진 양쪽 앞바퀴의 중심선과 뒷 차축 중심선의 연장선이 서로 만나는 지점을 중심으로 큰 원을 그리며 선회하게 되는데 이것을 최소 회전반경이라고 합니다. 이러한 최소 회전반경은 차량의 조종 안정성을 좌우하는 중요한 지표이자 각종 도로를 설계하는 기준이 되고 있기도 합니다.
일반적으로 자동차 도로의 최소 회전반경은 도로 폭에 따라 6~15m 이상으로 정해져 있으며, 자동차의 경우 차종과 차체 크기에 따라 다르지만 12m 이내여야 합니다. 대부분의 자동차는 6~10m 이내로 설계되고 있습니다.
같은 크기의 자동차라도 최소 회전반경이 크면 그만큼 스티어링 휠을 더 많이 돌려야 하므로 좁은 길에서 한 번에 빠져나오기가 어렵고 고속주행 때 차량의 운동 성능이 둔해질 수밖에 없지요. 특히 덩치가 큰 대형차의 경우 유턴을 할 때에도 회전하지 못하고 여러 번 전진과 후진을 반복해야 할 때도 있습니다.
이처럼 자동차의 최소 회전반경은 타이어의 트레드와 휠베이스 그리고 타이어의 조향각과 밀접한 관련이 있습니다. 자동차의 최소 회전반경을 설계할 때에는 복잡한 기계적 연결과 저속과 고속 등 주행속도와 조향각 등에 따라 삼각함수를 비롯한 복잡한 미적분방정식이 필요하지만 휠베이스와 타이어의 조향각만 알면 대략적인 최소 회전반경을 계산할 수 있습니다.
즉, 최소 회전반경은 휠베이스를 타이어의 최대조향각 사인값(Sin)으로 나눈 값으로 표현할 수 있는데요. 예를 들어 휠베이스가 2.5m인 자동차의 최대조향각이 29도라면 2.5m를 sin29도 값인 0.484로 나눈 결과값인 약 5.37m가 최소회전반경이라고 할 수 있습니다.
이처럼 자동차 휠베이스가 길어질수록 최소 회전반경 또한 커지는데요. 최근 출시되고 있는 차들은 공간 활용성을 극대화하기 위해 차체의 크기가 점점 커지고 있는 추세에 따라 사륜 조향 시스템 탑재의 필요성도 커지고 있습니다.

사륜 조향 시스템은 뒷바퀴가 일반적인 차량처럼 고정된 것이 아니라 앞바퀴처럼 조향각이 변화하기 때문에 조향각의 변화에 따라 앞서 설명드린 뒷차축의 연장성 대신 뒷바퀴의 조향각 중심의 연장선이 앞바퀴 조향각 중심과 만나는 각도가 좁아지게 되고 당연히 최소회전반경이 줄어들기 때문입니다.
사륜조향시스템은 운전자의 스티어링 휠 조작 정도를 모니터링함은 물론 주행속도와 차량의 자세 변화에 따라 뒷바쿠이의 조향각을 적게는 2.5도에서 4도, 많게는 최대 10도까지 최적으로 제어해 줌으로써 운전자가 좀 더 편하게 운전할 수 있도록 도와주는 것이 특징입니다.
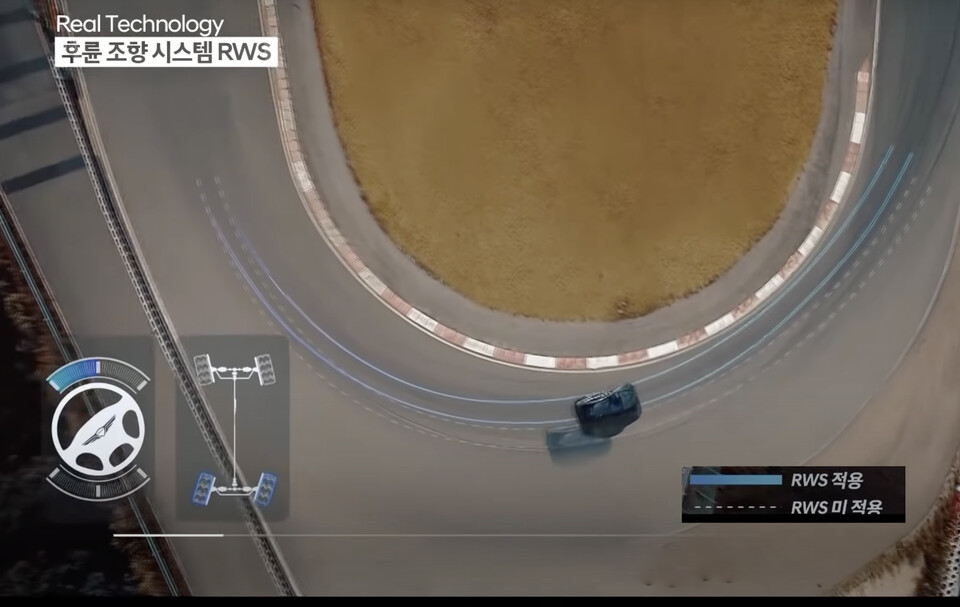
차량이 저속으로 주행할 경우에는 뒷바퀴가 역위상, 즉 앞바퀴와 반대방향으로 뒷바퀴가 조향됨으로써 회전반경이 줄어들게 됩니다. 이를 통해 좁은 곳에 주차한다든지 좁은 공간을 빠져나오거나 좁은 골목길 또는 유턴할 때 스티어링 휠을 일반차량보다 훨씬 적게 돌려도 여유있게 차량을 운전할 수 있지요.
한편 60~80km/h 이상의 고속으로 주행하는 경우에는 뒷바퀴가 앞바퀴와 동일한 방향으로 조향되는 동위상으로 회전함에 따라 곡선도로에서 빠르고 안전하게 주행할 수 있을 뿐 아니라 장애물이나 전방차량을 피하기 위해 급차선 변경을 하더라도 기존 차량보다 빠르게 장애물을 피할 수 있습니다.
장애물을 피한 후에도 빠르게 차체의 자세를 바로잡기 떄문에 조종안정성과 주행 안정성이 뛰어나다고 할 수 있습니다.
이러한 사륜 조향 시스템은 한 단계 더 나아가 드라이브 샤프트(구동력을 바퀴에 전달 해주는 기계 부품)와 같은 별도의 동력전달 부품이 필요 없는 인휠모터 시스템처럼 4개의 바퀴를 개별적으로 제어해 지능적인 토크 배분으로 4륜구동이 가능함은 물론 좌우 바퀴의 토크제어를 통해 최적의 선회 성능과 차체자세제어 성능을 제공할 것으로 보입니다.
게처럼 옆으로 움직이는 크랩주행이나 제자리에서 유턴할 수 있는 제로 턴과 같은 지금까지 보지 못했던 새로운 차량 움직임을 구현할 수도 있을 전망입니다.
김아롱 칼럼니스트/[email protected]
3
머니맨존
회원 먹튀사이트 최신글
-
내 차에 호환되는 차량용품, 소모품 파인더 오픈
[0] 2025-11-26 11:45 -
2025년 11월 국산차 판매조건/출고대기 정리
[0] 2025-11-01 16:45 -
토요타, '주행거리 746km' 신형 bZ4X 일본 출시…전기차 부진 털어낼까
[0] 2025-10-14 14:25 -
기아, 'PV5' 기부 사회공헌 사업 'Kia Move & Connect' 시작
[0] 2025-10-14 14:25 -
2025년 10월 국산차 판매조건/출고대기 정리
[0] 2025-10-01 17:45 -
2025년 9월 국산차 판매조건/출고대기 정리
[0] 2025-09-01 16:45 -
메르세데스 벤츠, 전기 SUV GLC EV 티저 이미지 공개
[0] 2025-08-05 17:25 -
2025년 8월 국산차 판매조건/출고대기 정리
[0] 2025-08-01 16:25 -
[EV 트렌드] 테슬라, 유럽서 모델 S·X 신규 주문 중단…단종 가능성은?
[0] 2025-07-31 14:25 -
2025년 7월 국산차 판매조건/출고대기 정리
[0] 2025-07-01 15:45
-
![[시승기] 폴스타, 업그레이드 폴스타 2 '화룡점정' 기대 이상의 주행 성능 개선](/images/upload/2023-11-06/thum_16992375055467518news.jpg)
[시승기] 폴스타, 업그레이드 폴스타 2 '화룡점정' 기대 이상의 주행 성능 개선
-
![[김필수 칼럼] 매일 한 곳 사라지는 '주유소'에 전기차 충전 시설을 갖추면](/images/upload/2023-11-06/thum_16992375045467519news.jpg)
[김필수 칼럼] 매일 한 곳 사라지는 '주유소'에 전기차 충전 시설을 갖추면
-

수입차 4개월 연속 감소세, 올해 남은 기간 '연두색 번호판' 특수 기대
-

KG 모빌리티, 토레스 EVX 양산 기념행사 개최
-

대동-KIRO, 자율운반 로봇 상용화를 위한 현장 실증 완료
-

캐딜락, 11월 특별 프로모션 진행
-

현대차그룹, 미국 실리콘밸리서 ‘모빌리티 혁신 포럼’ 개최
-

BMW 코리아, ‘뉴 i7 M70 xDrive’ 및 ‘뉴 i7 eDrive50’ 출시
-

KG 모빌리티, 사명변경 후 첫 전기차 '토레스 EVX' 양산 기념행사 개최
-

BMW, 고성능 순수전기 M '뉴 i7 M70 xDrive'ㆍ후륜구동 '뉴 i7 eDrive50' 출시
-

'악몽 같은 반응' 국내에 없는 현대차 팰리세이드 나이트 에디션 미국서 공개
-

현대차그룹, 모빌리티 혁신 기술 동향ㆍ비전 공유 ‘모빌리티 혁신 포럼’ 개최
-

폴스타 4, 수명 주기 평가에서 폴스타 출시 모델 중 가장 낮은 탄소발자국 배출
-
2023년 11월 국산차 판매조건/출고대기 정리
-

볼보, 첫 전기 미니밴 EM90 인테리어 사진 공개
-

미국 캘리포니아주, 3분기 배터리 전기차 판매 22.3% 증가
-

옵션 추가에 합리적 가격, 2024 르노코리아 XM3 1.6 GTe 인스파이어 시승기
-

특허청, 2023년 자동차모빌리티 기술 특허 포럼
-

맥라렌, 창립 60주년 기념 비스포크 옵션 공개.. 3대 레이싱 우승 ‘트리플 크라운' 상징 색상
-

'한 달간 팔린 E-클래스 2400여 대' 10월 수입차 판매 1위는 메르세데스-벤츠
- [포토] 섹시 망고 ㅋ
- [포토] 성진국 섹시 몸매
- [포토] 야한 모텔 여 [1]
- [포토] AV배우 전라 몸매
- [포토] 노출된 슴가 [1]
- [포토] SM 포박
- [포토] 섹시 몸매
- [유머] 약국 이름이 왜이래
- [유머] 이혼하러 온 부부들 풍경
- [유머] 세상에서 가장 예민한 사람
- [유머] 시원한 스케일링
- [유머] 붕어빵도 F와 T가 나뉘는 세상
- [유머] 타이타닉을 좋아하는 사람이 만든 눈사람
- [유머] 여자친구가 남자친구 단속하는 신박한 방법.. ㄷㄷ
- [지식] 토토사이트 이용 시 주의해야 할 사항 5가지
- [지식] 토토사이트에서 무조건 피해야 할 배팅 유형 5가지 [48]
- [지식] 토토사이트 이용 중에 발생할 수 있는 문제의 대처 방법 [46]
- [지식] 초보자를 위한 토토사이트 회원가입 시 알아야 할 주의사항 [55]
- [지식] 토토사이트 먹튀검증 하는 방법 먹튀 의심 사이트 식별하는 요령 [52]
- [지식] 토토사이트 먹튀검증! 안전한 배팅을 위한 필수 가이드 [53]
- [지식] 무패팀의 승리 확률만 믿고 스포츠토토 배팅하면 안되는 이유 [54]



